Cohesive Autonomous Navigation System
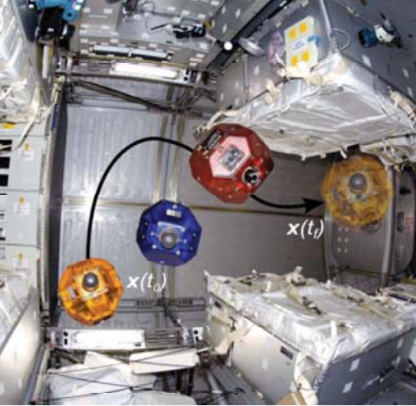
The ability for a robotic system to fully and autonomously interact with its environment is key to the future of applications such as commercial package delivery services, elderly robotic assistants, agricultural monitoring systems, natural disaster search and rescue robots, civil construction monitoring systems, robotic satellite servicing, and many more. An architecture that is conducive to Simultaneous Localization And Mapping (SLAM), path planning, and mission planning is a critical element of a system to be robust enough to handle such applications with true autonomy. The Cohesive Autonomous Navigation System is an architecture that lends itself to such cohesive operation of all the aforementioned goals through the implementation of a common core database to represent the environment.
As shown in the right, the central module of the system is the database, which talks to all the peripheral, or functional modules. These are the Image Processing, SLAM, Path Planning and Control modules.
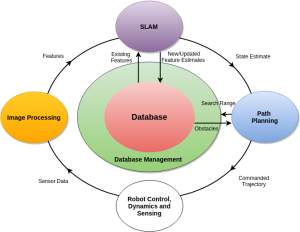
Image Processing
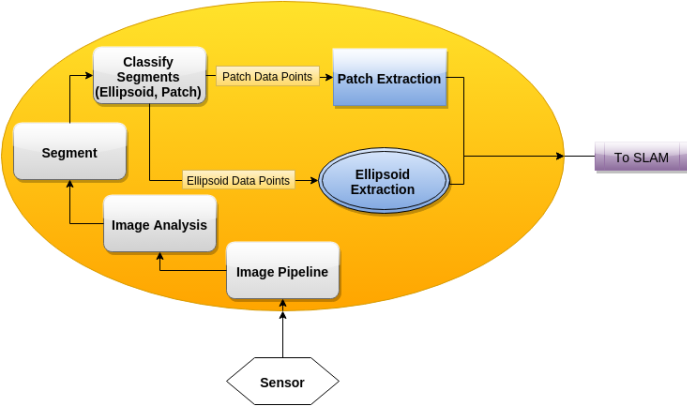
Image Processing combines Graph-Based Segmentation Algorithms and measures distinctive features like position, color, and Geographic Information Systems (GIS) derived metrics to create simpler representations of a complex environment.Image Processing functional flow
Database
The database is accessible by all peripheral modules and uses a k-vector formulation for efficient searching.Database Interface

Simultaneous Localization and Mapping (SLAM)
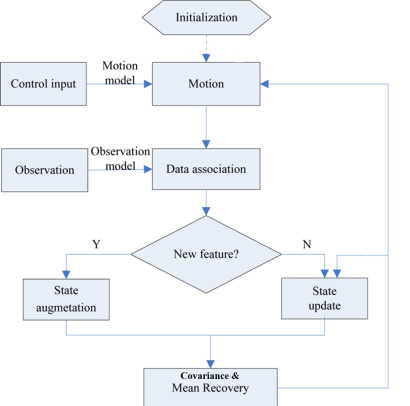
The SLAM module interfaces with the database to associate objects in the environment based on the image processing results. A stochastic filter (Kalman Filter or a variant of such) is used to keep track of the uncertainty in the system and environment.Simultaneous Localization and Mapping flow
Path Planning
Path planning is achieved through an algorithm called Admissible Subspace Trajectory Optimizer (ASTRO), which utilizes Legendre polynomials to create smooth paths around a subspace. The subspace is preselected by searching for objects in the database that may interfere with the possible paths.Path Planning