With a primary expertise in stochastic systems, control theory & optimization, Dr. Bhattacharya has been hard at work with several research projects at his Uncertainty Quantification Laboratory.
There, he leads broad-spectrum projects such as Uncertainty Quantification. Dynamical systems may have uncertainty that could be parametric or be excited by a random force. Uncertainty propagation addresses how these uncertainties affect the trajectory of the dynamical system. Study of dynamical
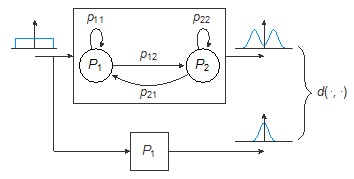
Uncertainty propagation and identification through a dynamical system.
systems with parametric uncertainty is simpler than systems influenced by random force. Dr. Bhattacharya and his group first describe techniques that can be used to study parametric uncertainty and then describe how systems with random forcing can be studied. The research is mainly on approximating systems with random forcing to systems with parametric uncertainty, and then studying the resulting system using tools for parametric uncertainty.
Dr. Bhattacharya is also actively involved with Robotics, UAVs & large scale computations. In the area of UAVs, he leads a group called Aerobotics. This group
Aerospace robotic vehicle designed at Aerobotics.
concentrates on Innovative Aerospace Robotics Design & Control. Here, they explore new concepts for aerospace vehicles and put them to the test at the Aerobotics Laboratory. This laboratory is primarily concerned with providing adhoc flying capabilities to arbitrary platforms, thereby enabling the control of objects through multiple flying vehicles.
For in-depth information about Uncertainty Quantification, Stochastic Systems and Optimization please visit the following website: uq.tamu.edu.
For in-depth information about multiple flying vehicles and robotics, please visit the following website: aerobotics.tamu.edu.