Dr. John Valasek is the Director of the Vehicle Systems and Control Laboratory (VSCL). Here, the primary research areas concentrate on intelligent autonomous flight control and vision based navigation systems.
Dr. Valasek is also the Director of the Center for Autonomous Vehicles and Sensor Systems (CANVASS). CANVASS research activities develop innovative, synergistic strategies for the design, analysis, control, validation and verification of complex autonomous vehicle and sensor systems operating in challenging environments.
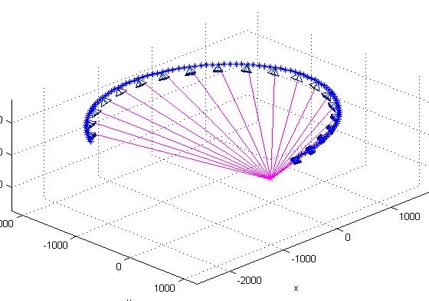
Simulation of line of sight to object of interest and resulting tracking pattern by UAS.
Dr. Valasek has a wide range of expertise in Unmanned Aerial Systems (UAS). His recent work has included intelligent motion video algorithms for UAS. In this research, he and his team concentrate on advancing the current and future technologies for Intelligence, Surveillance, and Reconnaissance (ISR) missions. These type of missions will be greatly enhanced by having UAS autonomously identify, track and communicate areas, objects and events of interest. To accelerate this thrust, there have been UAS Video Tracking Challenges held at the test facility of the VSCL, the Riverside flight test facility. 
Dr. Valasek has also published technical books, of those he is editor of Morhping Aerospace Vehicles and Intelligent and Autonomous Aerospace Systems.
To learn more about the Vehicle Systems and Control Laboratory, please visit: vscl.tamu.edu.
TO learn more about the Center for Autonomous Vehicles and Sensor Systems, please visit: lsuasc.tamucc.edu/canvass.