For Summer 2014, we had 3 students from Mexico joining the department to create autonomous Air Swimmers.
The Air Swimmer is a balloon, made with high quality nylon. It uses a tail fin to move through the air.
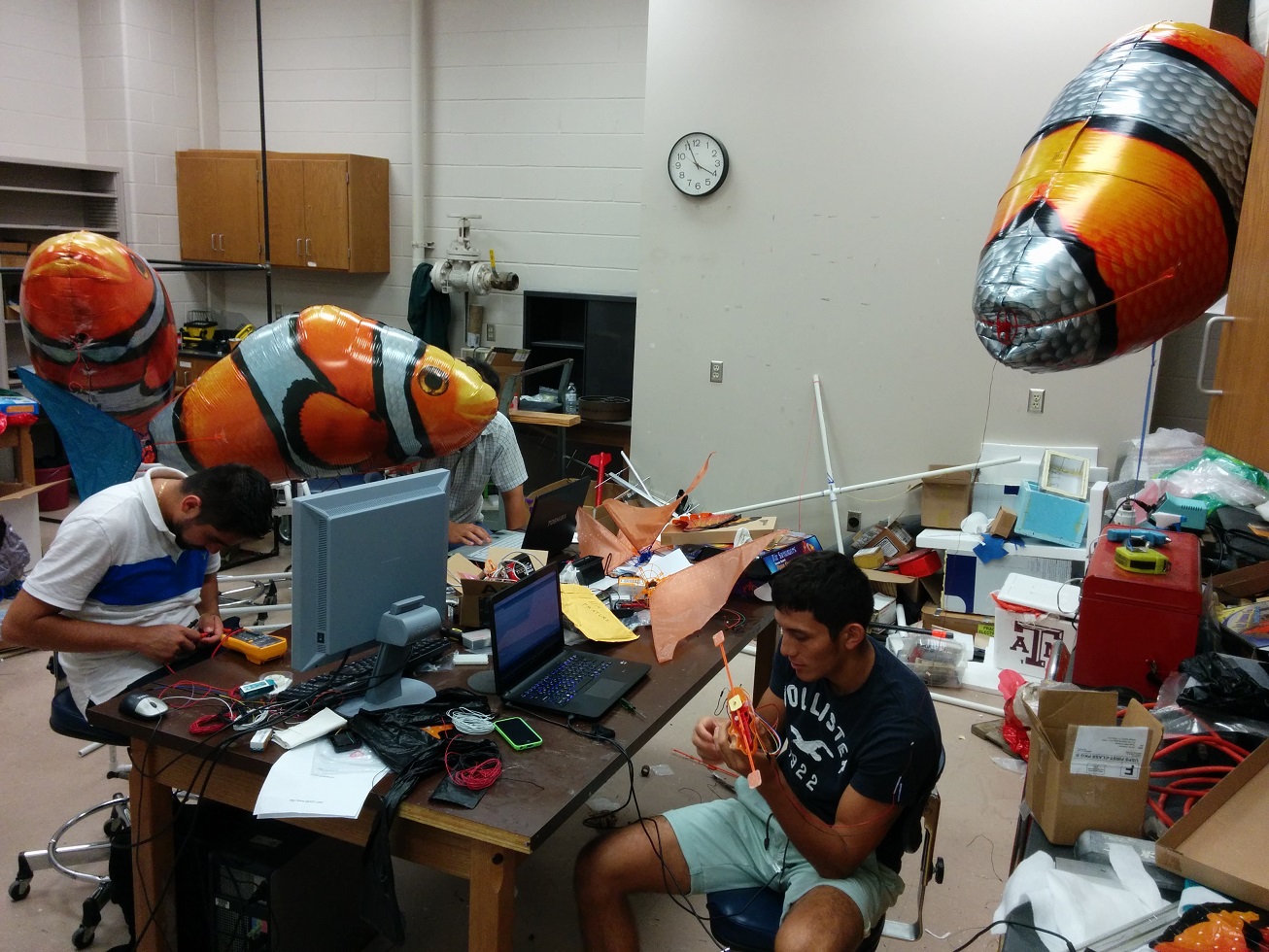
Students from the program hard at work installing custom servo motors to several Nemos (Air Swimmer balloons).
The students are implementing ultrasonic sensors in front and to the sides of the air swimmer for obstacle detection. Also, they are removing the tail fin motors with angular servo motors and a Arduino microcontroller. The Arduino will process the signal from the ultrasonic sensors to decide which way to point the tail fin and with which frequency to move it.
The data collected will be analyzed to answer the question of which amplitude, frequency, shape and tail- area are required to achieve the most efficient energy transfer from the motors to the motion of the air swimmer. With differently shaped tail fins, a balance between frequency and amplitude will be determined to pick the most versatile combination of these.
When the research is concluded, the microcontroller/servo motor package will be retrofitted to a fleet of air swimmers for use in STEM education with incoming Freshmen to Texas A&M University.