Dr. John Hurtado works in the area of guidance and control, with a primary expertise in theoretical dynamics and multi-agent Pursuit and Evasion Games. Dr. Hurtado operates most of his research in the state of the art LASR Lab.
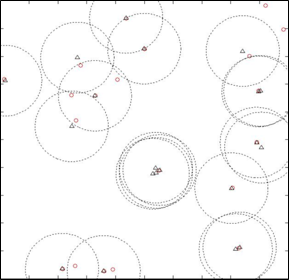
Multiple agents in a simulation performing a pursuit and evasion game.
His latest research efforts are primarily with task allocation of multi-agent systems against multiple targets. This research falls under the topic of Pursuit and Evasion Games. Pursuit and Evasion games represent a specific class of optimal control problems in which both the pursuer and evader attempt to play optimally by evaluating some cost function defining the game and their intentions. In a zero-sum game, the pursuer tries to minimize the same cost function that the evader is trying to maximize. A saddle point (if it exists) in a zero-sum game defines the best outcome any player can hope to achieve when the opponent is also playing optimally. It’s possible to realize the theoretical outcomes to these optimal control problems in hardware by tailoring the solution strategy to exploit the differentially flat characteristics of a planar robot.
Another current area of research is autonomous rendezvous in space debris application, also taking place at the LASR Lab. This work is in conjunction with Dr. Junkins’ close proximity
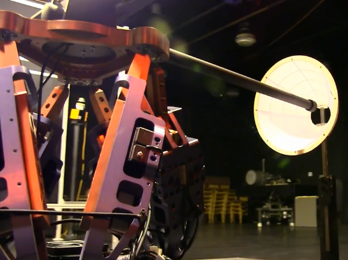
Docking platform performing proximity operations near a tumbling rocket nozzle (white)
operations for debris removal.
For more information please visit Dr. Hurtado’s website here.