Distinguished Professor of Aerospace Engineering, John Junkins is pushing the boundaries of knowledge and application in several research areas. His research interests include:
- Dynamics and Control of Spacecraft
- Guidance, Navigation and Astronautics
- Analytical and Numerical Methods
- Smart Sensor Technology
Among his current research efforts, lie the following: High Performance Space Debris Characterization, Space Debris Removal and Real-Time Simultaneous Localization and Mapping.
High Performance Space Debris Characterization
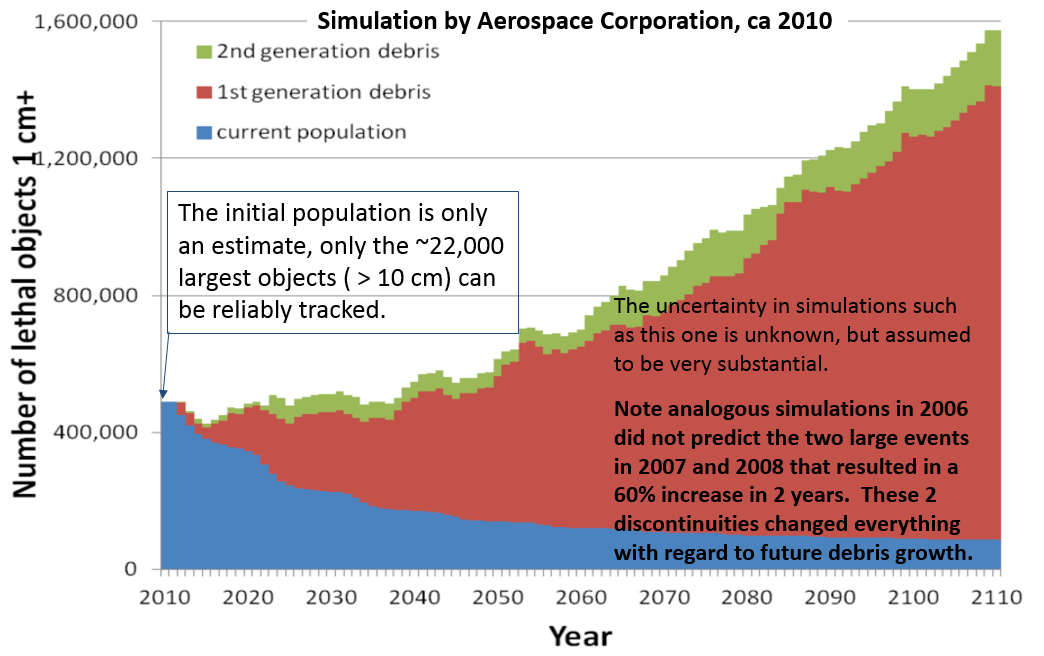
Space Situational Awareness (SSA) is the term frequently used to detect, track and identify objects in orbit around the Earth. These objects include both natural and man-made satellites. More generally, SSA seeks to characterize objects more comprehensively than just orbit determination. The recent satellite collisions of Iridium and Cosmos in 2007, and the intentional destruction of China’s Fengyun satellite in 2007, greatly increased the number of orbiting bodies and elevated the already challenging SSA problem. Orbital debris is hazardous to operational satellites and reducing the danger is possible by orbit debris rendezvous, capture and de-orbit missions directed at the most high priority debris objects.
The graph below shows how the amount of space debris in will grow in the coming years.
To characterize this abundance of space debris and ensure a correct estimation of parameters, Junkins et al. have come up with a way of associating a subset of many measurements with the same physical object, orbit determination, motion prediction, correlation with existing catalog, etc.
The Modified Chebisev-Picard Iteration (MCPI) algorithm allows the computation of orbit propagations at high speed and efficiency, which helps predict future motion of detected debris and correlate with the ephemeris of the catalog. Therefore, the MCPI algorithm solves the concerns described above. To read more about the MCPI algorithm, check out the related publications here.
Below is a video showing an example of an MCPI algorithm converging on an orbital path.
Large Object Debris Mitigation
Large objects, like derelict upper stages and dead spacecraft pose the most risk for worsening the debris problem if a collision happens. Objects with rocket nozzles are of particular interest to Junkin’s working group because of the proposed ideas to retrieve them. These include: real-time vision based mapping, close proximity operations guidance and control algorithms, and a universal pressure controllable compliant bladder for docking with debris.
Below is a video showing a debris removal run at the LASR Lab.
LASR GNC System for Active Debris Removal from Lasr Lab on Vimeo.
A custom object recognition algorithm uses a Microsoft Kinect to compute relative position and attitude data of the target nozzle with respect to the capture vehicle at approximately 15 Hz. A VectorNav VN-100 IMU is used on board the capture vehicle and provides body accelerations and angular velocities at 200 Hz.
The relative measurements are used to update a Continuous-Discrete Extended Kalman Filter while the IMU measurements are used for filter propagation. A Mission Handler determines the appropriate mission phase and generates the necessary reference trajectory for the capture vehicle.
A built in feedback controller is used to calculate the necessary commands to complete an example rendezvous mission. Vehicle emulation capabilities are made possible by a separate module which allows HOMER to replicate the motion of a virtual dynamic model. The Vicon motion capture system records position and attitude data of each vehicle to serve as the experimental truth and verify individual system components.
We are pleased to acknowledge that this work was supported by NASA Johnson Space Center and would not be possible without the efforts and insight of the ADR team. We would also like to thank the Texas Space Grant Consortium along with Jeremy Davis and James Doebbler of VectorNav Technologies.